Turtle-Bot Frontier Exploration Simulated
Project information
- Category: Robotics - Computer Vision
- Done for: University Module
- Project date: 2023
- Project URL: https://github.com/Daniel2tio/TurtleBot-Frontier
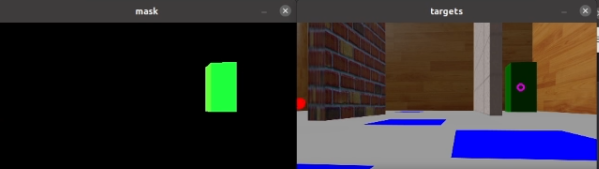
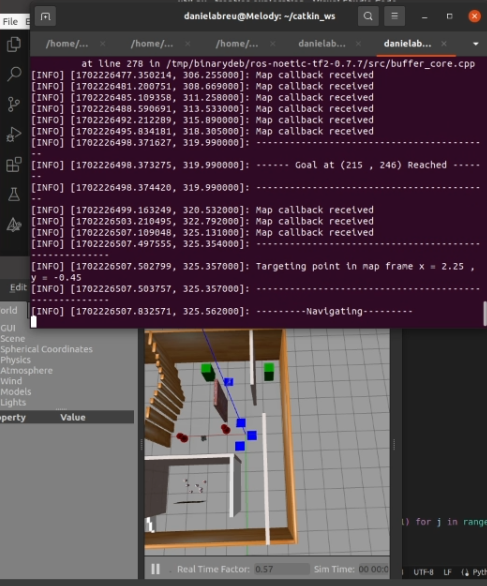
This project involved using a Turtle-Bot in a simulation to explore unkown maps using frontier exploration and visualise it to the user.
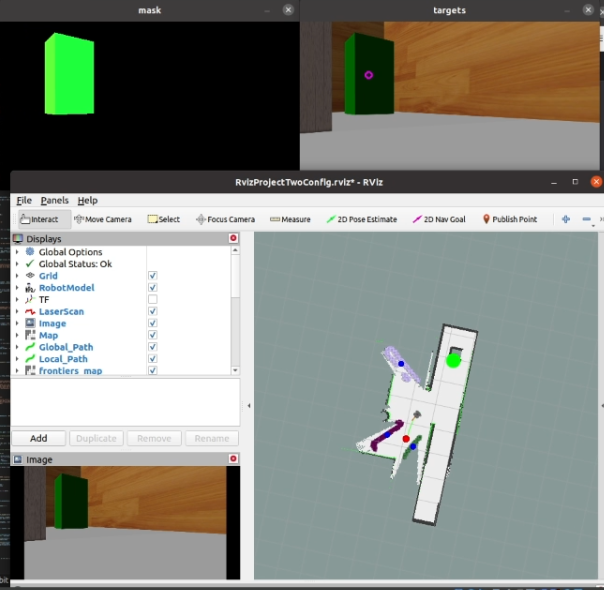
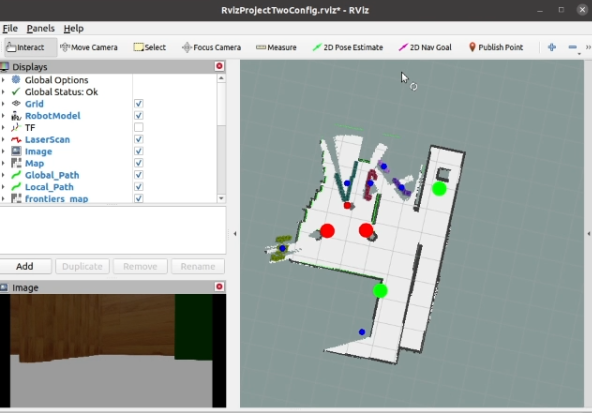
The project is centered around a workspace called catkin_ws, with its primary package frontier_exploration housing nodes and launch files. Key components include waffle_tf_listener.py, a Python script tracking the robot's position relative to the map, and RvizProjectTwoConfig.rviz, configuring RviZ with markers for robot camera, paths, and frontiers. The core script, auto_exploration.py, identifies frontier clusters and centroids by subscribing to /map for occupancy grid data, publishing maps of frontiers, and coordinating navigation to explore the entire map efficiently. Supporting this is util.py, providing utility functions. Overall, the project aims to enable autonomous navigation by detecting and exploring frontier regions efficiently, with auto_exploration.py serving as the primary engine for this purpose.